
Getriebe 57 mm * 57 mm Anpassung 9,6 V 1,8 Grad Nema 23 Schrittmotor







Spezifikationen
| Produktname | Getriebe Schrittmotor |
| Widerstand | 30 Ohm/Phase |
| Isolationswiderstand | 100 MΩ Min. 500 VDC DC |
| Nennspannung | 9,6 V |
| Haltemoment | 10 kg.cm |
| Induktivität | 20 MH/Phase |
| Radialspiel der Welle | ≤0,03 |
| Schubspiel der Welle | ≤0,1 |
| Aktuell | 1 A |
| Schrittwinkel | 1,8 Grad |
| Zertifizierung | CE-ROHS-ISO |
| Isolationsklasse | B |
Produktbeschreibung
Nema23 Stepper mit Getriebe.Hohes Drehmoment, geräuscharm, Schrittwinkel: 1,8°, NEMA23, 57 x 57 mm.Schrittmotor-Untersetzungsgetriebe Nema23.
Ein Schrittschaltgetriebe besteht aus einem inneren Sonnenrad, das mehrere äußere Zahnkränze antreibt, die als Planetenräder bekannt sind, daher der Name.Mehrere Kontaktpunkte im Design des Schrittschaltgetriebes ermöglichen eine höhere Drehmomenterzeugung im Vergleich zu einem Stirnradgetriebemotor.Für zusätzliche Stärke und Zuverlässigkeit sind die meisten mit einem Metallgetriebe ausgestattet.In bestimmten Situationen können wir auch Kunststoffverzahnungen liefern.Ein ISL-Planeten-DC-Getriebemotor ist in der Lage, verschiedene Last- und/oder Geschwindigkeitsanforderungen zu bewältigen und ist gleichzeitig eine hervorragende Option für kontinuierliche Drehmomentbelastungen.Sobald wir die Ausgangsanforderungen des Getriebemotors ermittelt haben, können wir das richtige Untersetzungsverhältnis konfigurieren.
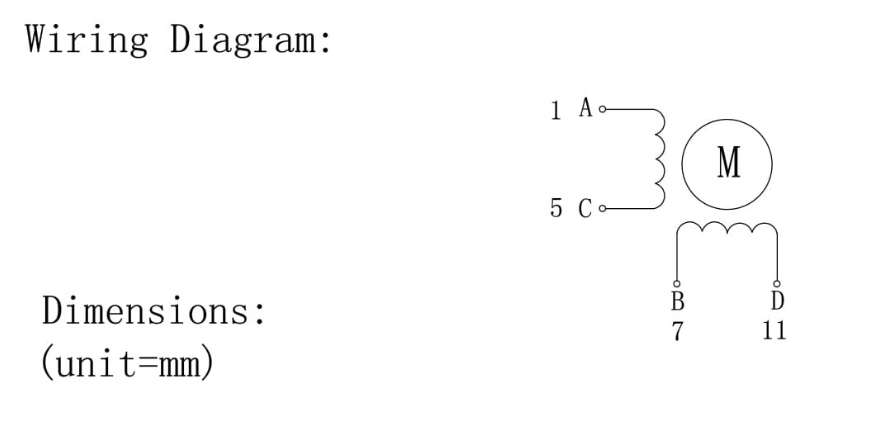
Elektrische Spezifikation
| Modell | 57BYGH231-05AG13 | |
| SCHRITTWINKEL | °/SCHRITT | 1.8 |
| NENNSPANNUNG | V | 9.6 |
| AKTUELL | EINE PHASE | 1 |
| WIDERSTAND | Ω/PHASE | 9.6 |
| INDUKTION | mH/PHASE | 20 |
| HALTEMOMENT | kg.cm | 10 |
| Getriebedurchmesser | mm | 56 |
| Länge | mm | 104 |
| Gewicht | kg | 1.10 |
| Isolationsklasse | B | |
Mechanische Dimension
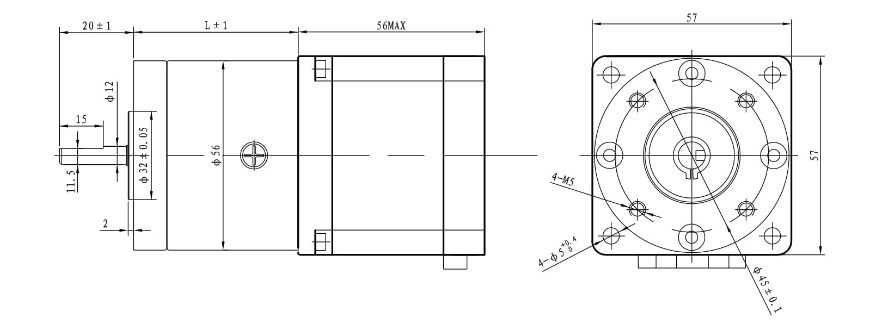
Außendurchmesser 56 mm Pulvermetallurgie-Getriebe

| Gehäusematerial | Lager am Ausgang | Radiallast (10 mm vom Flansch)N | Wellenaxiallast (N) | Max. Einpresskraft der Welle (N) | Radialspiel der Welle (mm) | Schubspiel der Welle (mm) | Spiel im Leerlauf (°) |
| Pulvermetallurgie | Gleitlager | ≤450 | ≤200 | ≤1000 | ≤0,03 | ≤0,1 | ≤1,5 |
| Untersetzungsverhältnis | Nenntoleranzdrehmoment (Nm) | Max. momentanes Toleranzdrehmoment (Nm) | Effizienz% | Länge L (mm) | Gewicht (g) | Anzahl der Getriebezüge |
| 1/4 | 2.0 | 6.0 | 81% | 41.3 | 491 | 1 |
| 1/6 | ||||||
| 1/15 | 8.0 | 25 | 72% | 59.6 | 700 | 2 |
| 1/18 | ||||||
| 1/26 | ||||||
| 1/47 | 16 | 50 | 72% | 59.6 | 700 | 2 |
| 1/66 |
Mechanische Dimension
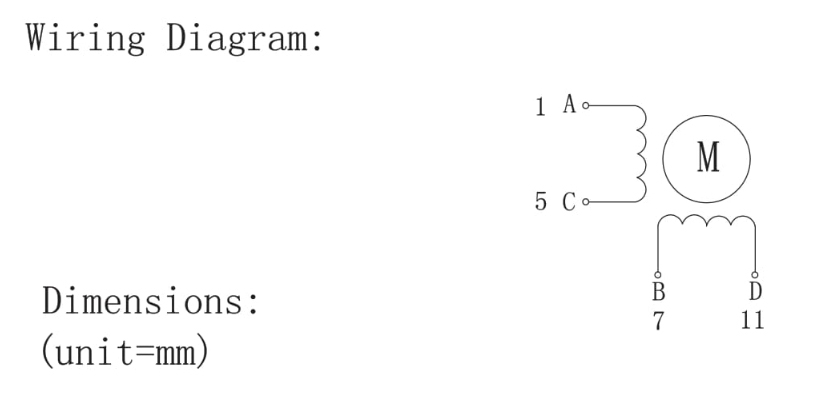
Elektrische Spezifikation
| Modell | 57BYGH406-17AG6 | |
| SCHRITTWINKEL | °/SCHRITT | 1.8 |
| NENNSPANNUNG | V | 6.2 |
| AKTUELL | EINE PHASE | 1.0 |
| WIDERSTAND | Ω/PHASE | 6.2 |
| INDUKTION | mH/PHASE | 18 |
| HALTEMOMENT | kg.cm | 9 |
| Getriebedurchmesser | mm | 52 |
| Länge | mm | 109 |
| Gewicht | kg | 1.7 |
| Isolationsklasse | B | |
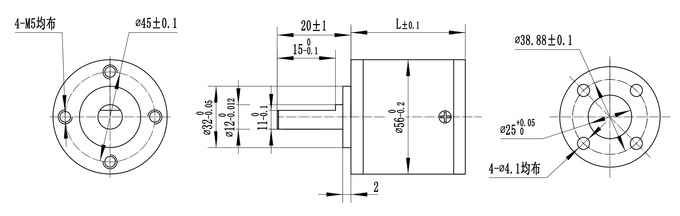
Mechanische Dimension
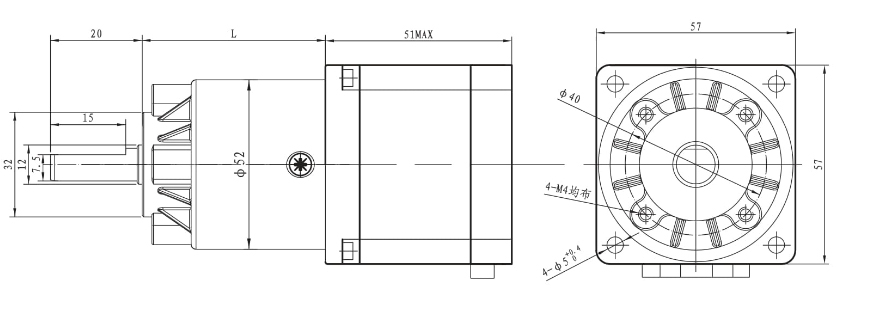
Außendurchmesser 52 mm Pulvermetallurgie-Getriebe
| Gehäusematerial | Lager am Ausgang | Radiallast (10 mm vom Flansch)N | Wellenaxiallast (N) | Max. Einpresskraft der Welle (N) | Radialspiel der Welle (mm) | Schubspiel der Welle (mm) | Spiel im Leerlauf (°) |
| Zinklegierung | Gleitlager | ≤450 | ≤200 | ≤1000 | ≤0,03 | ≤0,1 | ≤1,5 |
| Untersetzungsverhältnis | Nenntoleranzdrehmoment (Nm) | Max. momentanes Toleranzdrehmoment (Nm) | Effizienz% | Länge (mm) | Gewicht (g) | Anzahl der Getriebezüge |
| 1/13 | 2.0 | 6.0 | 81% | 52.9 | 345 | 1 |
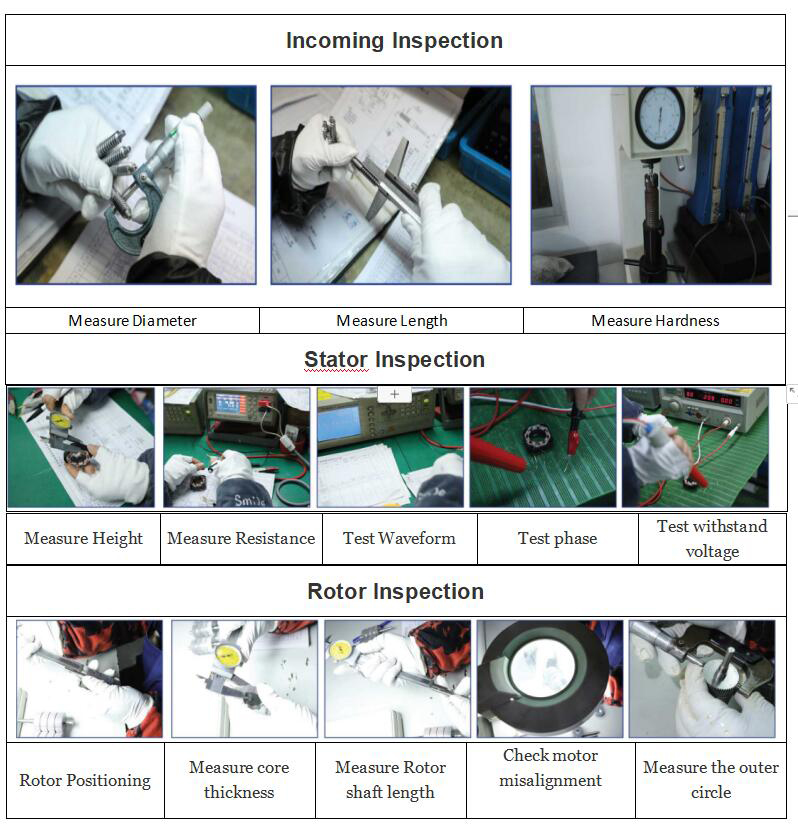
Qualitätskontrollprozess
Marktbereich

Vorteile
Vorteile des Schrittschaltgetriebemotors
1.Niedrige Kosten für die erzielte Kontrolle.
2.Hohes Drehmoment beim Start und niedrigen Drehzahlen.
3.Robustheit.
4. Einfachheit der Konstruktion.
5. Kann in einem Steuersystem mit offenem Regelkreis betrieben werden.
6. Geringer Wartungsaufwand.
7.Weniger wahrscheinlich zu blockieren oder zu rutschen.
8. Funktioniert in jeder Umgebung.
9. Kann in großem Umfang in der Robotik eingesetzt werden.
10.Hohe Zuverlässigkeit.
11.Der Drehwinkel des Motors ist proportional zum Eingangsimpuls.
Produktkategorien
-

Getriebe 28mm*28mm Anpassung 12 V 0,15 Nm N...
-

BLDC-Motor mit Getriebe High Speed High Quality...
-

Nema 23 Bldc Getriebemotor 4-polig 24V Werksp...
-

Nema 23 Bldc Getriebemotor 4-polig 24V Werksp...
-

Micro 22mm 0,87 Zoll Getriebe Brushless Motor 24...
-

Stabile Leistung Nema 11 Getriebe Schrittmotor ...





